UR中ROS仿真使用脚本命令控制
发布时间:2024-01-11 11:58:52
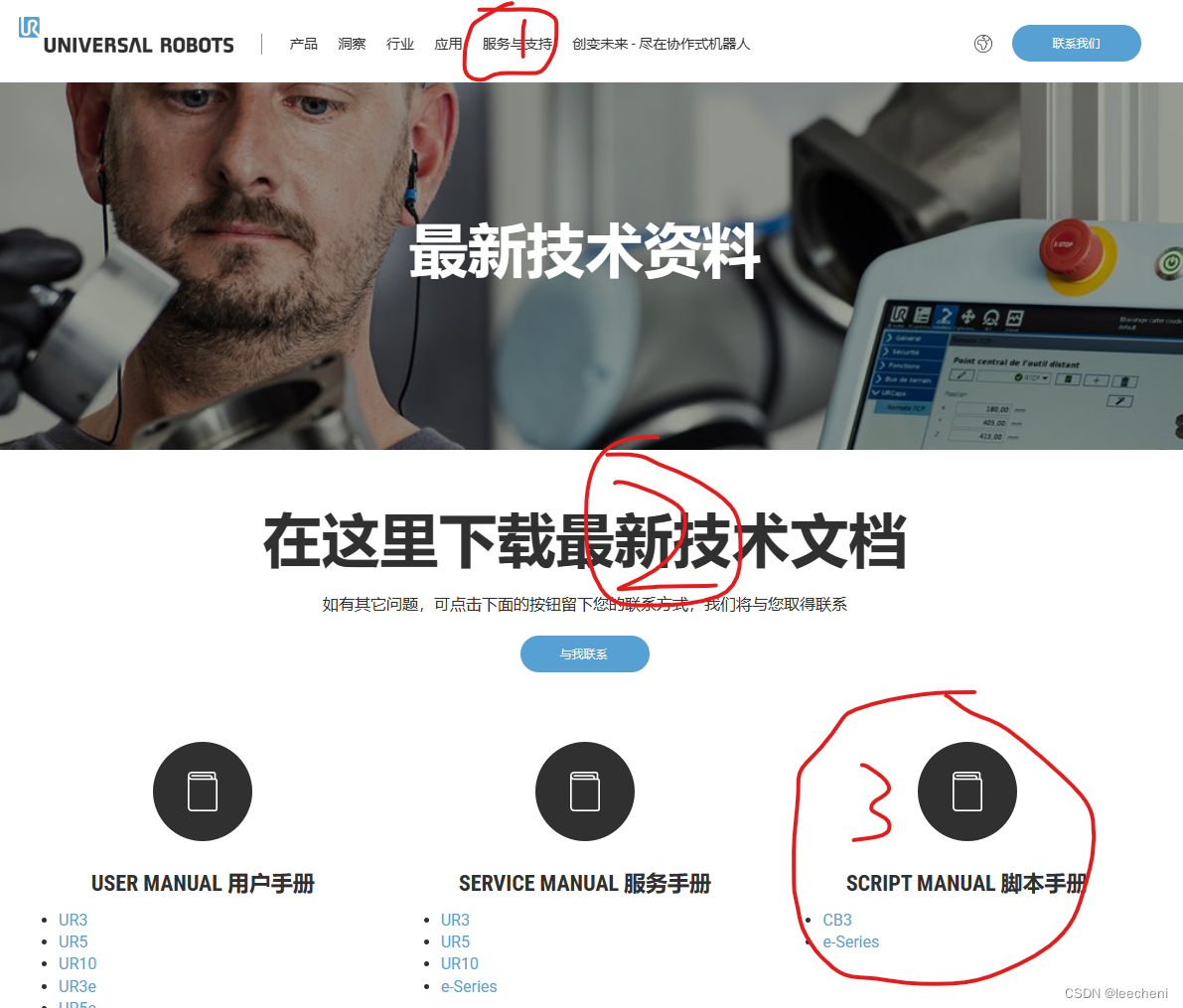
1.下载最新的脚本命令文件
在浏览器搜索“UR官网”,打开协作机器人的那个连接。

?按照图示进行点击下载官方的脚本文件
2.按ros2 ur部分的说明进行测试
网站如下:?
Usage — ur_robot_driver documentation

?查看现在的topic,找到最后那个/urscript_interface/script_command
cheni@yuchen:~$ ros2 topic list
/clicked_point
/diagnostics
/dynamic_joint_states
/force_torque_sensor_broadcaster/transition_event
/force_torque_sensor_broadcaster/wrench
/forward_position_controller/commands
/forward_position_controller/transition_event
/goal_pose
/initialpose
/io_and_status_controller/io_states
/io_and_status_controller/robot_mode
/io_and_status_controller/robot_program_running
/io_and_status_controller/safety_mode
/io_and_status_controller/tool_data
/io_and_status_controller/transition_event
/joint_state_broadcaster/transition_event
/joint_states
/parameter_events
/robot_description
/rosout
/scaled_joint_trajectory_controller/controller_state
/scaled_joint_trajectory_controller/joint_trajectory
/scaled_joint_trajectory_controller/transition_event
/speed_scaling_state_broadcaster/speed_scaling
/speed_scaling_state_broadcaster/transition_event
/tf
/tf_static
/urscript_interface/script_command
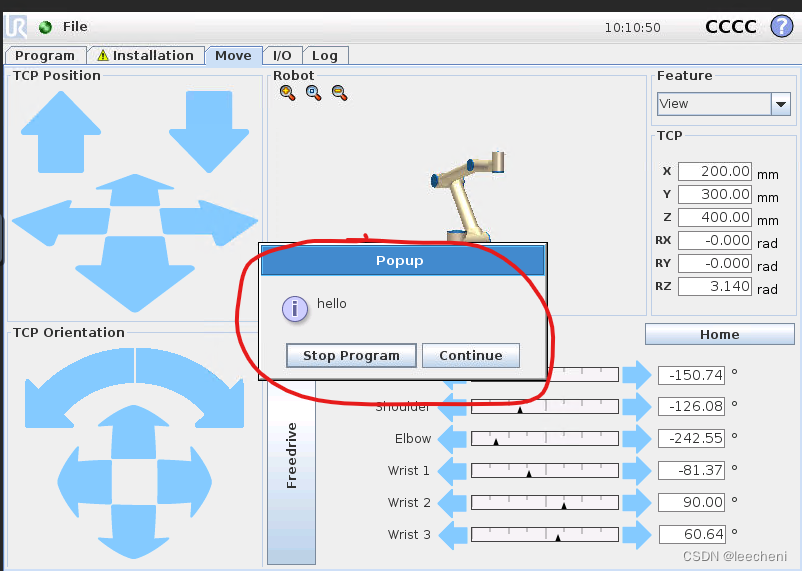
2.1弹窗测试
?输入下面的第一行
cheni@yuchen:~$ ros2 topic pub /urscript_interface/script_command std_msgs/msg/String '{data: popup("hello")}' --once
Waiting for at least 1 matching subscription(s)...
Waiting for at least 1 matching subscription(s)...
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='popup("hello")')
效果如下:
在浏览器中那个控制界面可以看到这个
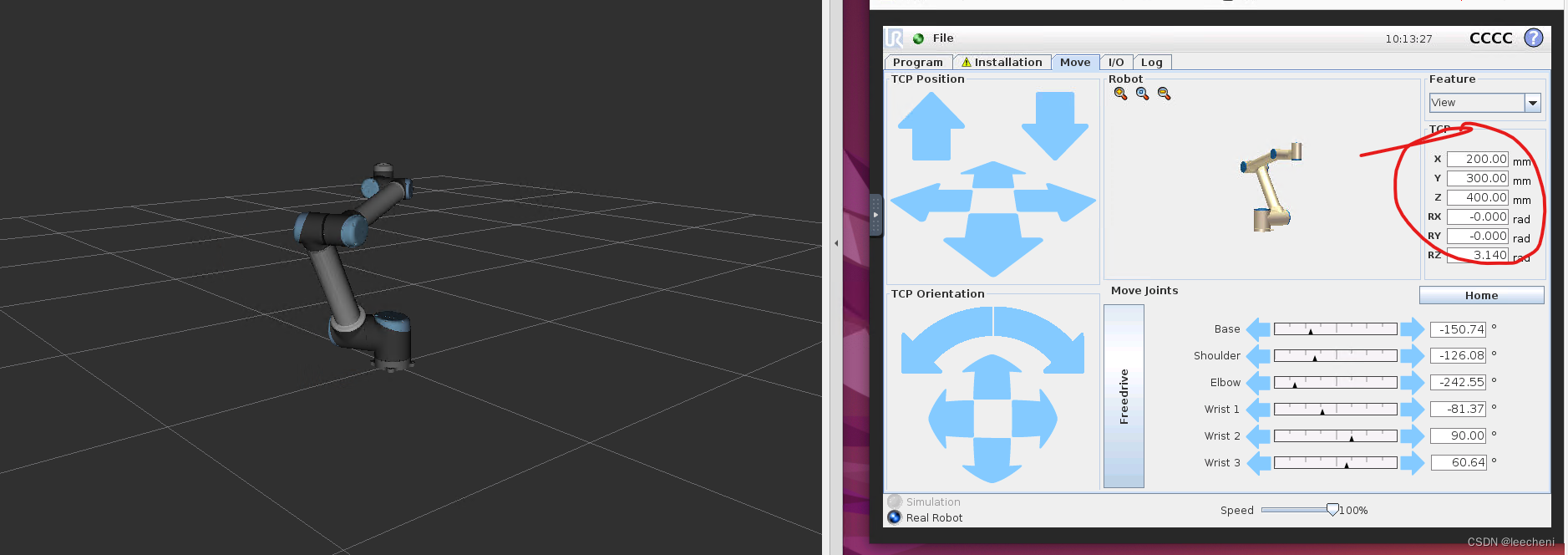
2.2 多行命令运动测试?
输入第一行的命令
cheni@yuchen:~$ ros2 topic pub --once /urscript_interface/script_command std_msgs/msg/String '{data:
"def my_prog():
set_digital_out(1, True)
movej(p[0.2, 0.3, 0.8, 0, 0, 3.14], a=1.2, v=0.25, r=0)
textmsg(\"motion finished\")
end"}'
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='def my_prog():\nset_digital_out(1, True)\nmovej(p[0.2, 0.3, 0.8, 0, 0, 3.14], a=1.2, v=0.25, r=0)\ntextmsg("motion finished")\nend')
机器人从当前位置移动到命令要求的位置,查看TCP位置与最终位置一致
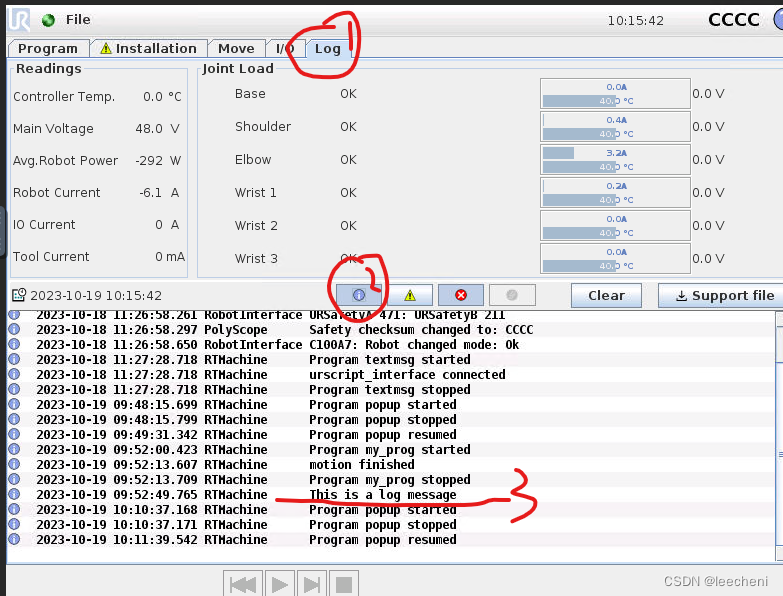
2.3 不打断程序的日志信息命令
?输入第一行的命令
cheni@yuchen:~$ ros2 topic pub --once /urscript_interface/script_command std_msgs/msg/String '{data:
"sec my_prog():
textmsg(\"This is a log message\")
end"}'
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='sec my_prog():\ntextmsg("This is a log message")\nend')
效果如下:
可以逐步点击确认
3.总结
以上就是三种命令的测试,其他的命令可以按照脚本描述的去测试。在虚拟机上仍然可以仿真机器人。?
文章来源:https://blog.csdn.net/xiaoding_ding/article/details/133928868
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
最新文章
- 亚马逊鲲鹏系统给我带来的真实体验感
- GNN Torch functions
- pytorch中nonzero()的用法
- fill的用法
- Pytorch中torch.nonzero()函数解析
- ECMAScript 6 Promise - 通过Promise输出题理解Promise
- java 集成 layIm 聊天工具
- Sql server 日期转换处理大全
- 宝塔面板部署laravel项目填坑总结[持续更新]
- Redis哈希槽,对于哈希槽的理解,以及高并发情况下哈希槽不够的情况讲解,热点缓存的解决思路
- npm依赖包bin文件路径问题
- 抖店一件代发怎么做?需要粉丝基数吗?
- mac系统下配置域名映射关系
- 【C++】String类的实现
- 安全用电监测预警系统-保障电力设施安全运行