树莓派CAN通讯教程 - MCP2515
树莓派CAN通讯教程 - MCP2515
1. 楔
在上篇文章树莓派GPIO和PWM控制教程中,笔者详细介绍了如何使用树莓进行普通IO控制模拟,以及PWM 波形发送等操作,同时还提到了汽车电子常见的CAN 通讯也能够使用树莓派完成,本文针对此进行详细说明。
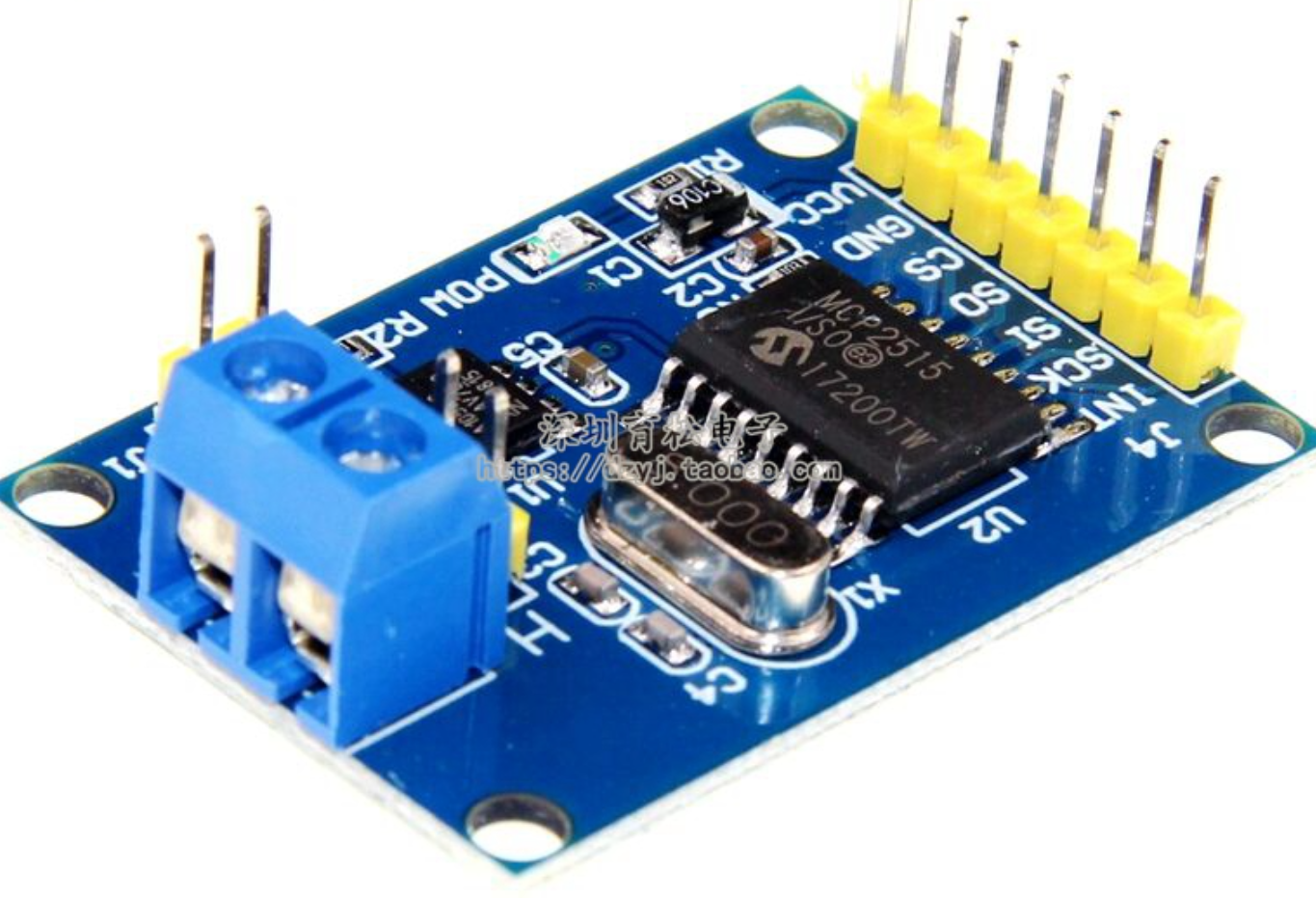
使用硬件为树莓派3b+, MCP2515 spiCAN模块 ,总成本控制在300 元以内。使用树莓派4b也可以,不过近期的4b价格离谱,而且仅仅can和io的测试,3b+性能完全够用。
操作系统使用ubuntu server ,如使用Raspberry Pi OS 也可以,本教程也可适用。需要注意的是,不能魔法上网的同学需要首先进行操作系统换源,以及python3 的换源。而其中ubuntu server arm 的系统不能够按照常用的清华源教程替换,需要使用后缀为-ports的源,笔者使用的源如下:
-
/etc/apt/sources.list# 默认注释了源码仓库,如有需要可自行取消注释 deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse

2. 硬件连接和环境准备
连接MCP2515和树莓派spi接口,并在操作系统中开启spi,整个的运行原理就是让MCP2515的CAN 通讯作为网络通讯接口,挂接到socketCAN 上,使用系统驱动spi,无需手工编写spi驱动以及can wrapper部分。针对socketCAN,网上有很多优秀的开源工具可以使用,笔者这里使用的是cantools ,可以使用dbc进行报文格式解析。
2.1. 硬件连接
RPi Pin RPi Label CAN Module
02---------5V------------VCC
06---------GND-----------GND
19---------GPIO10--------MOSI (SI)
21---------GPIO9---------MISO (SO)
22---------GPIO25--------INT
23---------GPIO11--------SCK
24---------GPIO8---------CS
2.2. 环境准备
-
安装socket can工具以及cantools工具
sudo apt install can-utils pip3 install cantools -
使能树莓派SPI并加载MCP2515内核驱动
针对Ubuntu server 操作系统,在
/boot/firmware/usercfg.txt文件后添加如下内容,若操作系统为Raspberry Pi OS,则在/boot/config.txt文件后添加如下内容:dtparam=spi=on dtoverlay=mcp2515-can0,oscillator=16000000,interrupt=25 dtoverlay=spi1-1cs -
重启
sudo reboot -h now
2.3. 检测MCP2515是否被正确挂载
输入sudo ifconfig -a指令可以看到已经挂载了网络通讯卡CAN0,如没有ifconfig,则使用sudo apt install net-tools进行安装
ubuntu@ubuntu:~$ sudo ifconfig -a
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 9343435 bytes 74747480 (74.7 MB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 8 bytes 64 (64.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
eth0: flags=4099<UP,BROADCAST,MULTICAST> mtu 1500
ether b8:27:eb:c2:61:84 txqueuelen 1000 (Ethernet)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
输入 sudo ip -s -d link show can0 查看can0 通讯是否进入ready状态。
ubuntu@ubuntu:~$ sudo ip -s -d link show can0
3: can0: <NOARP,ECHO> mtu 16 qdisc pfifo_fast state DOWN mode DEFAULT group default qlen 10
link/can promiscuity 0 minmtu 0 maxmtu 0
can state STOPPED restart-ms 0
bitrate 1000000 sample-point 0.750
tq 125 prop-seg 2 phase-seg1 3 phase-seg2 2 sjw 1
mcp251x: tseg1 3..16 tseg2 2..8 sjw 1..4 brp 1..64 brp-inc 1
clock 8000000
re-started bus-errors arbit-lost error-warn error-pass bus-off
0 0 0 0 0 0 numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535
RX: bytes packets errors dropped overrun mcast
74955120 9369390 0 0 0 0
TX: bytes packets errors dropped carrier collsns
64 8 0 0 0 0
3. CAN 通讯设置及程序开发
如上步骤如果已经完成,则可进行相关CAN 通讯开发,使用python和c都可以,因为系统支持命令行进行报文发送读取及设定,所以python可以简单的调用系统命令。c的话不建议调用系统命令,而是使用socket接口进行编程。
需注意,由于硬件限制,此方案can通讯波特率最高仅支持500Kbps
3.1. 系统命令
-
关闭can0
sudo ip link set can0 down -
设置波特率 500K ,需注意bitrate 需要除2才是常规的通讯波特率
sudo ip link set can0 type can bitrate 1000000 -
开启can0
sudo ip link set can0 up -
查看状态
sudo ip -s -d link show can0 -
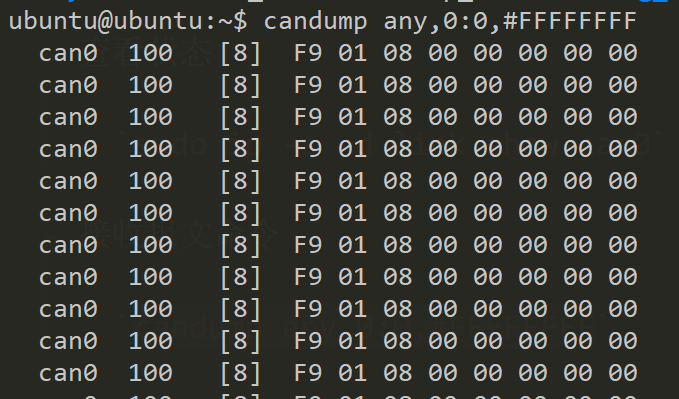
接收报文命令
candump any,0:0,#FFFFFFFF -
联合 cantools 使用dbc文件进行报文解码
candump can0 | cantools decode temp.dbc -
发送报文命令
cansend can0 123#1122334455667788 -
设置回环 波特率 250K ,用于测试can通路,在没有其它硬件连接测试的情况下,可以设定成回环,自发自收
sudo ip link set can0 type can bitrate 500000 loopback on
3.2. c语言调用socket接口进行开发
/**
*-----------------------------------------------------------------------------
* @file can_control.c
* @brief
* @author Tomato
* @version 0.1
* @date 2021-07-22
* @note [change history]
*
* @copyright NAAAAA
*-----------------------------------------------------------------------------
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#define command "ip link set can0 type can bitrate 1000000"//将CAN0波特率设置为500K
#define up "ifconfig can0 up"//打开CAN0
#define down "ifconfig can0 down"//关闭CAN0
int can_init()
{
//关闭CAN设备,设置波特率后,重新打开CAN设备
system(down);
system(command);
system(up);
return 0;
}
int can_send(can_frame frame)
{
int s, nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
//创建套接字
s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
strcpy(ifr.ifr_name, "can0" );
//指定 can0 设备
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
//将套接字与 can0 绑定
bind(s, (struct sockaddr *)&addr, sizeof(addr));
//发送 frame[0]
nbytes = write(s, &frame, sizeof(frame));
if(nbytes != sizeof(frame))
{
printf("Send Error frame[0]\n!");
}
close(s);
return 0;
}
int can_receive(struct can_frame * r_frame,unsigned int filter_id)
{
int s, nbytes = 0;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
struct can_filter rfilter;
// Initial fram
memset(&frame,0,sizeof(can_frame));
//创建套接字
s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
strcpy(ifr.ifr_name, "can0" );
//指定 can0 设备
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
//将套接字与 can0 绑定
bind(s, (struct sockaddr *)&addr, sizeof(addr));
//设置过滤规则,取消当前注释为禁用过滤规则,即不接收所有报文,
// 不设置此项(即如当前代码被注释)为接收所有ID的报文。
if (filter_id != 0)
{
rfilter.can_id = 0x123;
// CAN_EFF_MASK | CAN_SFF_MASK
rfilter.can_mask = CAN_SFF_MASK;
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
}
while (nbytes == 0)
{
//接收总线上的报文保存在frame中
nbytes = read(s, &frame, sizeof(frame));
}
*r_frame = frame;
#ifdef MSG_DEBUG
printf("the nbytes:%d\n", nbytes);
printf("length:%d", sizeof(frame));
printf("ID=0x%X DLC=%d\n", frame.can_id, frame.can_dlc);
printf("data0=0x%02x\n",frame.data[0]);
printf("data1=0x%02x\n",frame.data[1]);
printf("data2=0x%02x\n",frame.data[2]);
printf("data3=0x%02x\n",frame.data[3]);
printf("data4=0x%02x\n",frame.data[4]);
printf("data5=0x%02x\n",frame.data[5]);
printf("data6=0x%02x\n",frame.data[6]);
printf("data7=0x%02x\n",frame.data[7]);
#endif
return 0;
}
int led_ctl_on(void)
{
struct can_frame frame;
memset(&frame, 0, sizeof(can_frame));
frame.can_id = 0x101;
frame.can_dlc = 8;
frame.data[0] = 1;
can_send(frame);
return 0;
}
int led_ctl_off(void)
{
struct can_frame frame;
memset(&frame, 0, sizeof(can_frame));
frame.can_id = 0x101;
frame.can_dlc = 8;
frame.data[0] = 2;
can_send(frame);
return 0;
}
float can_get_vol(void)
{
float vol_vle = 0;
struct can_frame frame;
memset(&frame, 0, sizeof(can_frame));
// wait until can frame 100 received
can_receive(&frame,0);
printf("###############################\n");
printf("length:%d", sizeof(frame));
printf("ID=0x%X DLC=%d\n", frame.can_id, frame.can_dlc);
printf("data0=0x%02x\n",frame.data[0]);
printf("data1=0x%02x\n",frame.data[1]);
printf("data2=0x%02x\n",frame.data[2]);
printf("data3=0x%02x\n",frame.data[3]);
printf("data4=0x%02x\n",frame.data[4]);
printf("data5=0x%02x\n",frame.data[5]);
printf("data6=0x%02x\n",frame.data[6]);
printf("data7=0x%02x\n",frame.data[7]);
vol_vle = (float)frame.data[0]/50;
return vol_vle;
}
int main(int argc, char* argv[])
{
char control_str[15];
float vol_val = 0;
if (argc < 2) {
printf("can_control service_type\n"
" example: ./can_control led_off/led_on/get_vol\n"
);
return 0;
}
strcpy(control_str,argv[1]);
// debug
printf("Argc : %d\n",argc);
printf("Argv : %s\n , %s\n",argv[0], argv[1]);
// can_init();
if (strcmp(control_str,"led_off")==0)
{
led_ctl_off();
}
else if (strcmp(control_str,"led_on")==0)
{
led_ctl_on();
}
else if (strcmp(control_str,"get_vol")==0)
{
vol_val = can_get_vol();
printf("Voltage is : %5.2f V\n", vol_val);
}
else
{
/* Do nothing */
}
return 0;
}
3.3. 实际效果
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。 如若内容造成侵权/违法违规/事实不符,请联系我的编程经验分享网邮箱:chenni525@qq.com进行投诉反馈,一经查实,立即删除!
- 亚马逊鲲鹏系统给我带来的真实体验感
- GNN Torch functions
- pytorch中nonzero()的用法
- fill的用法
- Pytorch中torch.nonzero()函数解析
- ECMAScript 6 Promise - 通过Promise输出题理解Promise
- java 集成 layIm 聊天工具
- Sql server 日期转换处理大全
- 宝塔面板部署laravel项目填坑总结[持续更新]
- Redis哈希槽,对于哈希槽的理解,以及高并发情况下哈希槽不够的情况讲解,热点缓存的解决思路
- npm依赖包bin文件路径问题
- 抖店一件代发怎么做?需要粉丝基数吗?
- mac系统下配置域名映射关系
- 【C++】String类的实现
- 安全用电监测预警系统-保障电力设施安全运行